12Df-xxF-27 Datasheet
1. 주요 특장점
- 1세대 D12 시리즈를 기반으로 기능이 개선된 2세대 보급형 액츄에이터
- 마이크로 사이즈
- 정밀 위치 제어
- 전류 피드백 통한 스톨 포스 제어
- 속도 제어(1024 해상도)
- 체적 대비 강한 힘
- 드라이브 회로 내장 (RS-485 통신 지원)
- 토탈 매니저 소프트웨어를 통한 Parameter 셋팅 가능
- Metal Alloy Rod (D12는 플라스틱 Rod)
2. Specification
2.1 공통 사양
Property | Value |
|---|---|
스트로크 | 27mm |
정격 부하 | 기어비에 따라 6N ~ 12N |
정격부하시 Duty Rate | 50% 이하 |
Micro controller | 32bit Arm Cortex |
위치해상도 | 4096 Resolution (A/D Converter) |
입력 전압 | 12.0V(정격), 7.4V ~ 13 V(입력범위) |
Motor Type / Watt | Coreled DC Motor / 0.37Watt |
소모전류 | 30mA(Idle), 100mA(Rated), 300mA(Stall) |
반복정밀도 | 단방향 0.03mm(30um)이하 |
양방향 +/0.06mm(60um)이하 | |
전류 값 오차 | 50mA 이상 조건에서 ±15% |
위치센서 | 10kΩ linearity potentiometer |
크기,무게 | 57.4(L)x29.9(W)x15(H)mm / 49~52g (to be varied according to gear ratio) |
통신 | RS485 |
Protocol | IR Robot Open Protocol (기본설정) / MODBUS RTU protocol(사용자 전환가능) |
동작온도 | -10℃ ~ 60℃ |
방수방진 | IP-54 |
기구백래쉬 | 0.03mm(30um) |
가청소음 | Max. 50db at 1m |
기어비 | 10:1(6F,12F) |
기어 타입 | Engineering plastic gears(6F, 12F) |
Rod 타입 | Stainless steel rod |
표준 악세서리 | 1xHinge base |
액츄에이터 단 커넥터 타입 | MOLEX 53253-0470 |
와이어 하네스 | MOLEX(51065-0400) to MOLEX (51065-0400)/ 200mm / 0.08x60(22AWG) |
2.2 전압
| Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
| 공급 전압 | 7.4 | 12 | 13 | V | |
| 로직 인가 전압 | -7.0 | - | 12.0 | V | RS-485 |
2.3 Currents / 전류
| Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
| 최대 피크 전류 | ≤300 | mA | Stall Current | ||
| 무 부하 전류 | ≤50 | mA | No Load | ||
| 정격 부하 시 전류 | ≤100 | mA | |||
| 대기 전류 | ≤35 | mA |
2.4 온도
| Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
| 보관온도 | -20 | - | 70 | ℃ | |
| 동작 온도 | -10 | - | 60 | ℃ |
2.5 스트로크
| Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
| MIN Position / 최소 수축 위치 | 3.3 | 3.8 | 4.3 | mm | ⁕ |
| MAX Position / 최대 확장 위치 | 30.3 | 30.8 | 31.3 | mm | |
| 스트로크 | 27.0 | mm |
- 복수의 mightyZAP의 최소 수축 위치를 완벽하게 동일하게 설정해야 하는 경우, 별도 협의
- 매니저 소프트웨어 또는 파라메터 맵의 Min / Max Position Calibration 기능으로 Min / Max 위치 값 동기화 가능.
2.6 무부하 속도
Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
Maximum Speed at 12.0V | 32.4 | 36.0 | 39.6 | mm/s | 12Df-6x-27 |
10.8 | 12.0 | 13.2 | mm/s | 12Df-12x-27 |
2.7 부하
Parameter | Min | Rated | Max | Unit | Note |
|---|---|---|---|---|---|
부하 at 12.0V | 6.0 | N | 12Df-6x-27 | ||
1.34 | lbf | ||||
0.61 | kgf | ||||
12.0 | N | 12Df-12x-27 | |||
2.69 | lbf | ||||
1.22 | kgf |
⁕ 1 kgf = 9.8N, 1lbf = 4.45N
Caution / 주의
최적의 수명 관리를 위해 액추에이터는 정격 부하 범위 내에서 사용해야 합니다.
12Df 시리즈는 정격 부하의 2배에 해당하는 최대 허용 부하 사양을 제공하지 않습니다.
2.8 셀프-락 기능
Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
Slef Lock | - | N/A(불가) | - | 12Df-6x-27 | |
- | Available(가능) | - | 12Df-12x-27 |
Tip Self-Lock 이란
액츄에이터가 전원을 통한 모터의 힘 없이, 기구마찰력만으로 위치를 고수할 수 있는 힘을 의미합니다.
3. 참고 자료
3.1 Voltage Vs Speed
입력 전압에 따른 무 부하 시 속도 변화에 대한 그래프 입니다. 해당 Data는 오차를 포함하고 있음으로 참고로 사용하시면 됩니다.
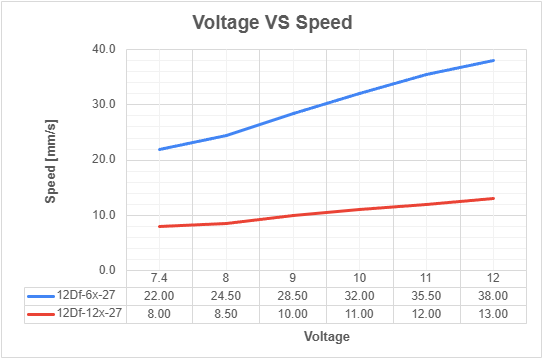
Voltage Vs Speed는 Goal Current 300에서 Test한 Data입니다.
해당 Data는 약 +/-15%오차를 포함하고 있습니다.
3.2 Voltage Vs Stall Force
입력 전압에 따른 300mA에서 Stall Force를 측정한 Data입니다. 해당 Data는 오차를 포함하고 있음으로 참고로 사용하시면 됩니다.
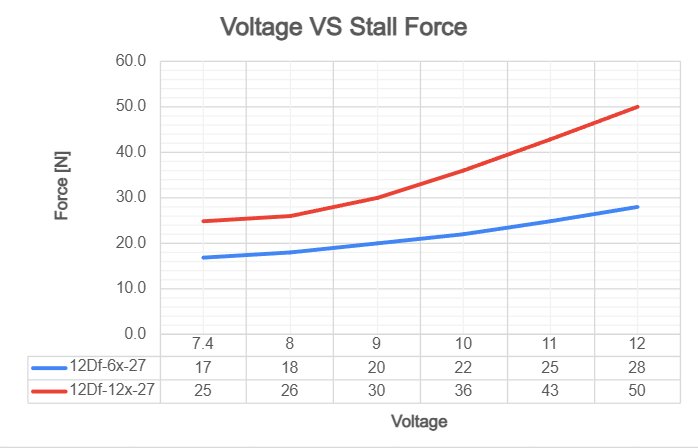
Voltage Vs Stall Force Data는 Goal Current 300에서 Test한 Data입니다.
각 Force 값의 오차는 +/- 15% 입니다.
Caution
Stall force는 참고용으로, 제품의 파손을 방지하기 위해 실제 application에서의 사용시에는 정격부하에 맞추어 사용하여 주십시오.
3.3 Goal Speed Vs Speed
Goal Current가 300일 때, Goal Speed Parameter 값의 변화에 따른 무 부하 속도 변화를 나타냅니다. 정격 부하 이하의 경우, 부하 정도에 따라 최고 속도가 나오는 시간이 달라지게 됩니다.

Goal Speed Vs Speed Data는 Goal Current 300에서 Test한 Data입니다.
3.4 Goal Current vs Stall Force
Goal Current 값에 대한 mightyZAP의 Stall Force를 나타냅니다. Stall Force 측정 방식은 속도 값을 최소한으로 하여 순수 전류 값에 대한 힘만 측정한 값입니다.
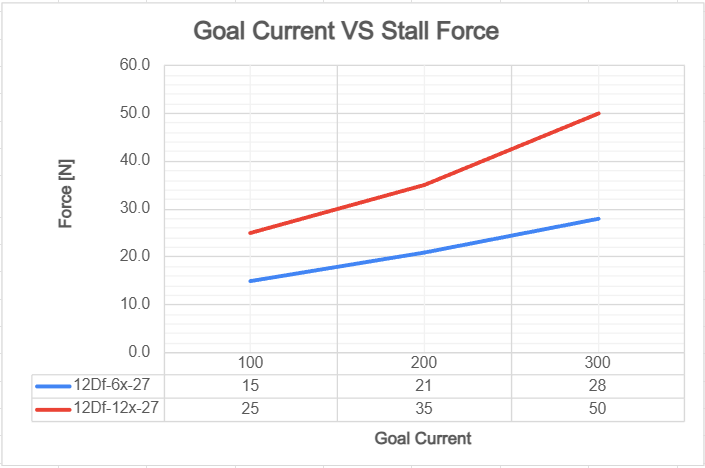
주의사항
각 Goal Current 값에 대한 Stall Force갑의 오차는 +/- 15%입니다. 붉은색으로 표기된 부분은 내부 부하 및 발열에 의해 오차가 큼으로 참고용으로만 사용하여 주시기 바랍니다. 지속적인 부하가 발생하여 1A 이상의 전류가 흐를 경우 전류값이 점점 하락하여 1A에서 안정적으로 유지 됩니다.
3.5 Goal Current vs Speed (정격부하시)
정격 부하 시 Goal Current 값에 대한 mightyZAP의 속도 변화를 나타냅니다.
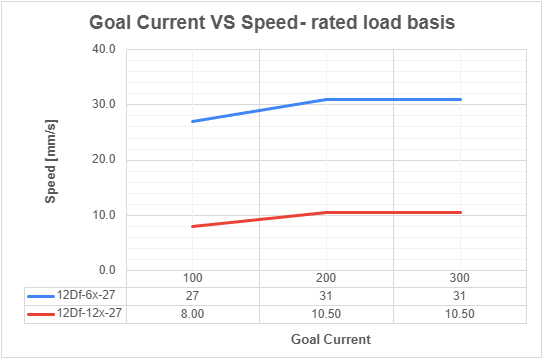
Goal Current Vs Speed Data는 정격 부하 상태에서 측정한 Data입니다.
주의사항
Speed Data는 약 +/-10% 오차를 가지고 있습니다. 붉은색으로 표기된 부분은 해당 Goal Current 값에서의 Stall Force와 정격부하가 비슷한 구간으로 mightyZAP이 움직이지 않을 수 있습니다. 참고용으로만 사용하여 주시기 바랍니다.
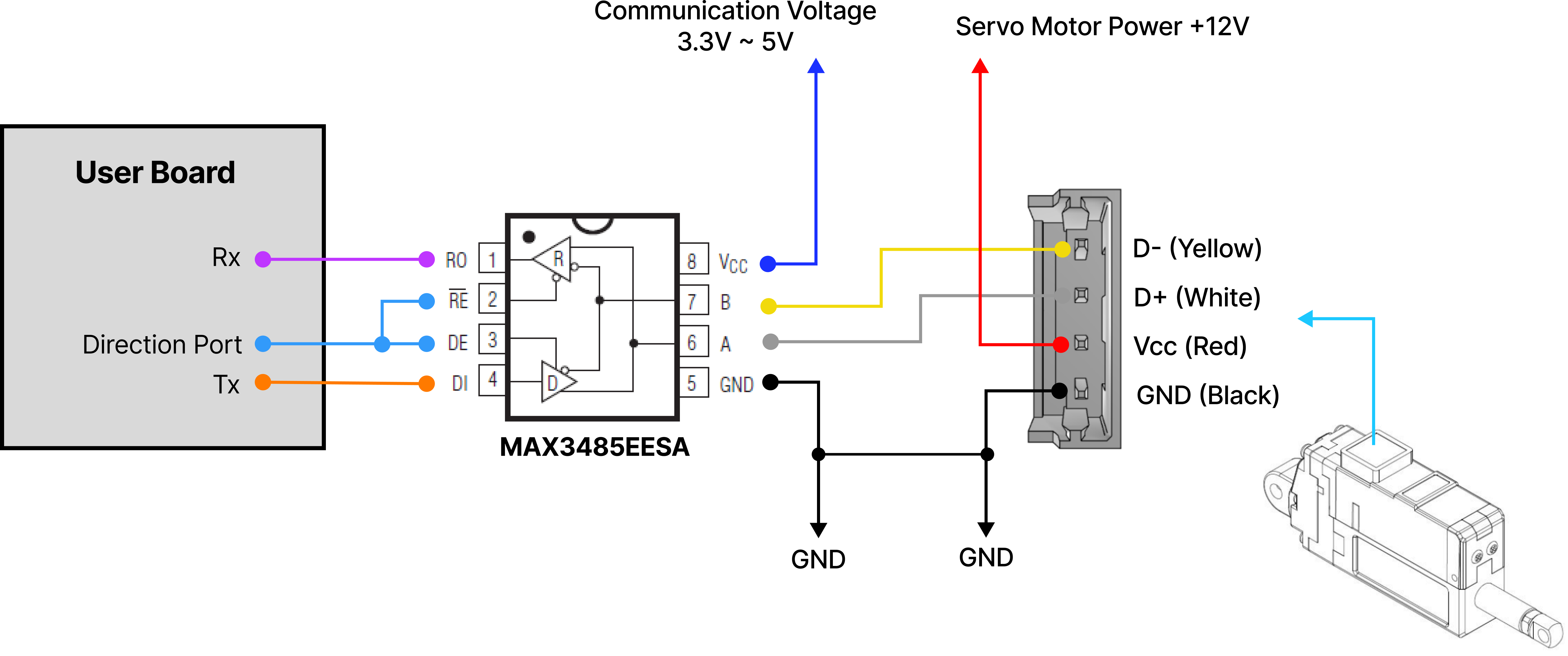
3.6 PIN Map
| PIN NUMBER(COLOR) | PIN NAME | FUNCTION |
|---|---|---|
| 1(YELLOW) | D- | RS-485- |
| 2(WHITE) | D+ | RS-485+ |
| 3(RED) | VCC | Power + |
| 4(BLACK) | GND | Power - |