12Df-xxF-27 Datasheet
1. Features
- A second-generation, cost-effective actuator with enhanced functionality over the first-generation D12 Series
- Micro size
- Precise position control
- Force control by current feedback
- Speed control (1024 resolution)
- Strong force comparing to the size
- Built-in Drive Circuitry (RS-485)
- Parameter programmable on the Manager software
- Metal Alloy Rod (cf. D12 : Plastic Rod)
2. Specification
2.1 Common Specifications
Property | Value |
|---|---|
Stroke | 27mm |
Rated Load | 6N and 12N |
Duty cycle at rated load | Max. 50% |
Micro controller | 32bit Arm Cortex |
Position Resolution | 4096 Resolution (A/D Converter) |
Input Voltage | 12.0V(Rated), 7.4V ~ 13 V(Operating) |
Motor Type / Watt | Cored DC Motor / 0.37Watt |
Current consumption | 30mA(Idle), 100mA(Rated), 300mA(Stall) |
Position repeatability | Uni-directional less than 0.03mm(30um) |
Bi-directional less than +/0.06mm(60um) | |
Current Tolerance | ±15% at Over 50mA |
Position sensor | 10kΩ linearity potentiometer |
Size, Weight | 57.4(L)x29.9(W)x15(H)mm / 45g |
Communication | RS-485 |
Protocol | IR Robot Open Protocol (default) / MODBUS RTU protocol(Switchable) |
Operating Temperatures | -10℃ ~ 60℃ |
Ingress protection | IP-54 |
Mechanical Backlash | 0.03mm(30um) |
Audible Noise | Max. 50db at 1m |
Gear ratio | 10:1(6F,12F) |
Gear type | Engineering plastic gears(6F, 12F) |
Rod type | Stainless steel rod |
Standard Accessory | 1xHinge base |
Connector Type (Male) in the Actuator | MOLEX 53253-0470 |
Wire Harness | Molex(51065-0400) to Molex(51065-0400)/ 200mm / 0.08x60(22AWG) |
2.2 Voltages
| Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
| Supply voltage | 7.4 | 12 | 13 | V | |
| Logic input voltage | -7.0 | - | 12.0 | V | RS-485 |
2.3 Currents
| Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
| Maximum peak Current | ≤300 | mA | Stall Current | ||
| No Load Current | ≤50 | mA | No Load | ||
| Rated Load Current | ≤100 | mA | |||
| Idle Current | ≤35 | mA |
2.4 Temperatures
| Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
| StorageTemp. | -20 | - | 70 | ℃ | |
| Operating Temp. | -10 | - | 60 | ℃ |
2.5 Strokes
| Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
| MIN Position | 3.3 | 3.8 | 4.3 | mm | ⁕ |
| MAX Position | 30.3 | 30.8 | 31.3 | mm | |
| Stroke length | 27.0 | mm |
- Contact us if min position of multiple actuators should be exactly same. Or,
- Synchronize Min / Max Position by “Min / Max Position Calibration” feature on Manager software or Parameter Map
2.6 No Load Speed
Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
Maximum Speed at 12.0V | 32.4 | 36.0 | 39.6 | mm/s | 12Df-6x-27 |
10.8 | 12.0 | 13.2 | mm/s | 12Df-12x-27 |
2.7 Rated Load
Parameter | Min | Rated | Max | Unit | Note |
|---|---|---|---|---|---|
Load at 12.0V | 6.0 | N | 12Df-6x-27 | ||
1.34 | lbf | ||||
0.61 | kgf | ||||
12.0 | N | 12Df-12x-27 | |||
2.69 | lbf | ||||
1.22 | kgf |
⁕ 1 kgf = 9.8N, 1lbf = 4.45N
Caution
For optimal service life, the actuator should be operated within the Rated load. The 12Df Series does NOT provide a maximum allowable load equivalent to twice the rated load.
2.8 Self Lock Feature
Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
Slef Lock | - | N/A | - | 12Df-6x-27 | |
- | Available | - | 12Df-12x-27 |
Tip Self-Lock
Self-Lock means the actuator can hold its position by mechanical friction without motor power.
3. Reference
3.1 Voltage Vs Speed
Graph of speed change at no load according to input voltage. Data includes error, use as reference.
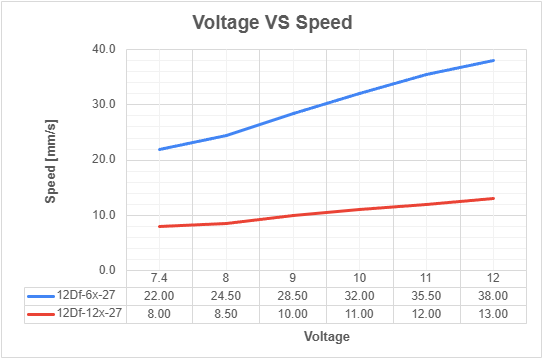
The Voltage vs. Speed graph is based on test data measured at a Goal Current setting of 300.
The data includes an approximate tolerance of ±15%.
3.2 Voltage Vs Stall Force
Stall Force measured at 300mA according to input voltage. Data includes error, use as reference.
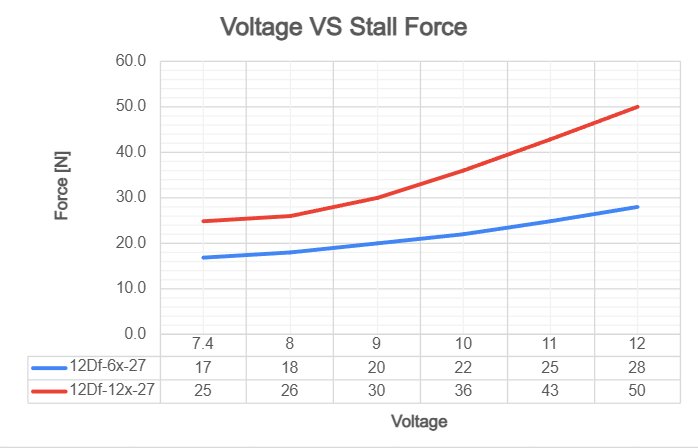
Voltage Vs Stall Force data tested at Goal Current 300. Each Force value error is +/- 15%.
Caution
Stall force is for reference only. To prevent product damage, use at rated load in actual application.
3.3 Goal Speed Vs Speed
Shows no load speed change according to Goal Speed Parameter value at Goal Current 300. At less than rated load, time to reach max speed varies by load.

Goal Speed Vs Speed data tested at Goal Current 300.
3.4 Goal Current vs Stall Force
Shows mightyZAP Stall Force for each Goal Current value. Stall Force measured at minimum speed to reflect only current-based force.
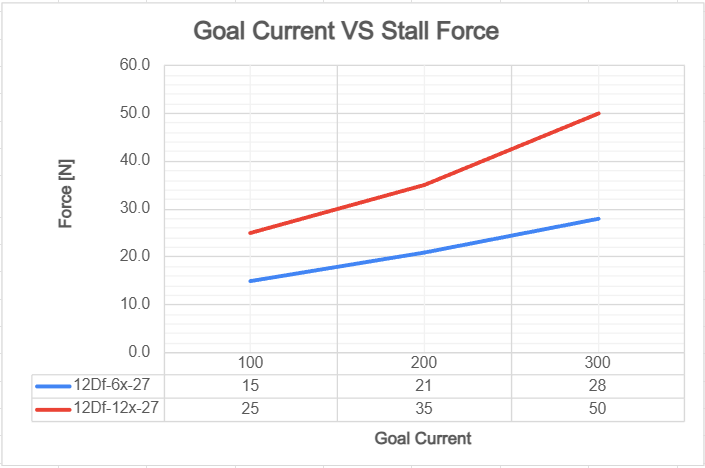
Each Stall Force value error is +/- 15%. Red-marked areas have large error due to internal load and heat, use as reference only. If continuous load causes current over 1A, current value will decrease and stabilize at 1A.
3.5 Goal Current vs Speed at Rated Load
Shows mightyZAP speed change for each Goal Current value at rated load.
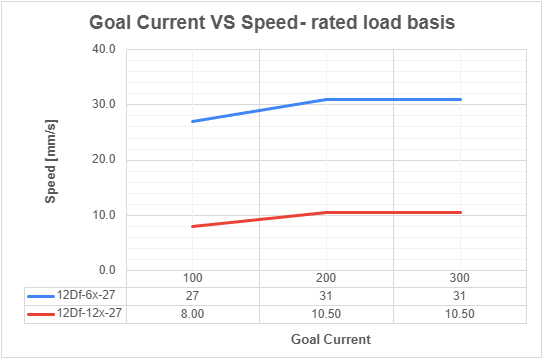
Goal Current Vs Speed data measured at rated load.
Speed data has about +/-10% error. Red-marked areas are where Stall Force and rated load are similar, mightyZAP may not move. Use as reference only.
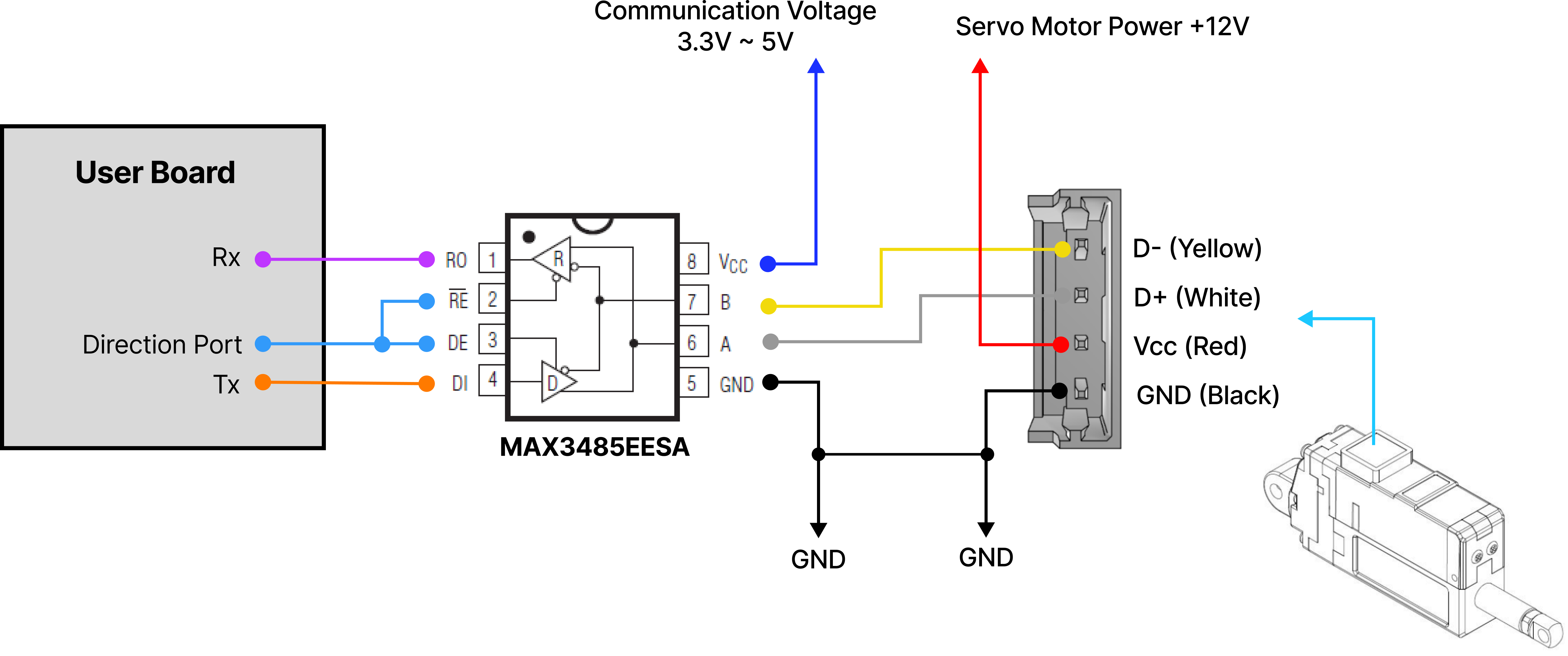
3.6 PIN Map
| PIN NUMBER(COLOR) | PIN NAME | FUNCTION |
|---|---|---|
| 1(YELLOW) | D- | RS-485- |
| 2(WHITE) | D+ | RS-485+ |
| 3(RED) | VCC | Power + |
| 4(BLACK) | GND | Power |