L12-xxPT-10 Datasheet
1. Features / 주요 특장점
- Micro size / 마이크로 사이즈
- Precise position control / 정밀 위치 제어
- Strong force comparing to the size / 체적 대비 강한 힘
- Built-in Drive Circuitry / 드라이브 회로 내장
- TTL/PWM communication / TTL/PWM 통신 지원
- Parameter programmable on the Manager software / 매니저 소프트웨어를 통한 Parameter 셋팅 가능
2. Specification
2.1 Common Specifications / 공통 사양
| Property | Value |
|---|---|
| Stroke / 스트로크 | 96mm |
| Rated Load / 정격 부하 | 17N~30N according to gear ratio(See appendix.) / 기어비에 따라 17~31N(별첨 참조) |
| Recommended duty cycle/정격부하 시 권장 듀티 사이클 | under 50% (50% 이하) |
| Micro controller | 32bit Arm Cortex |
| Position Resolution | 4096 Resolution (A/D Converter) |
| Input Voltage / 입력 전압 | 12.0V(Rated/정격), 7.4V ~ 13 V(Operating) |
| Motor Type / Watt | Coreless DC Motor / 3.5 Watt |
| Current consumption / 소모전류 | 30mA(Idle), 380mA(Rated), 1.6A(Stall) |
| Position repeatability | Unidirectional less than 0.05mm(50um) |
| Bydirectional less than +/0.1mm(100um) | |
| Position sensor / 위치센서 | 10kΩ linearity potentiometer |
| Size, Weight /크기,무게 | 151.5(L)x36(W)x18(H)mm **/**177g (to be varied according to gear ratio) |
| Communication/ 통신 | TTL/PWM(Automatic signal recognition / 신호자동인식) → TTL Level voltage : 3.3 ~ 5.0V → PWM Pulse range : 900us(retracted/최대수축) – 1500us(center) – 2100us(extended/최대확장) → TTL Communication range / TTL 통신 통달 거리 : Max.4m |
| Protocol | IR Open Protocol (MODBUS is for Force control lineup only.) |
| Operating Temperatures / 동작온도 | -10℃ ~ 60℃ |
| Ingress protection / 방수방진 | IP-54 |
| Mechanical Backlash / 기구백래쉬 | 0.03mm(30um) |
| Audible Noise / 가청소음 | Max. 50db at 1m |
| Gear ratio / 기어비 | 10:1(20PT,30PT) |
| Gear type / 기어 타입 | Engineering plastic gears(20PT,30PT), (Aluminum and stainless steel combination) |
| Rod type / Rod 타입 | 스테인레스 스틸 |
| Standard Accessory / 표준 악세서리 | 1xHinge base 1x Hinge 1xHinge shaft 1xRod end tip 2x M3 NUT 3 x M2.5x6 screws 1x Molex wire harness (200mm) 1 x M3 spanner 1 x Socket set screwlex wire harness (200mm) 1 x M3 spanner 1 x Socket set screw |
| Connector Type (Male) in the Actuator | MOLEX 22-03-5035 |
| Wire Harness | Molex(50-37-5033) to Molex(50-37-5033)/ 200mm / 0.08x60(22AWG) |
2.2 Volatges / 전압
| Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
| Supply voltage/ 공급 전압 | 7.4 | 12 | 13 | V | |
| Logic input voltage / 로직 인가 전압 | 2.0 | 3.3 | 5.5 | V | TTL |
2.3 Currents / 전류
| Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
| Maximum peak Current / 최대 피크 전류 | 2.1 | 2.2 | 2.3 | A | Stall Current |
| No Load Current / 무 부하 전류 | 180 | 200 | 220 | mA | No Load |
| Rated Load Current /정격 부하 시 전류 | 420 | 450 | 480 | mA | Rated Load |
| Idle Current | 25 | 30 | 35 | mA |
2.4 Temperatures / 온도
| Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
| StorageTemp. / 보관온도 | -20 | - | 70 | ℃ | |
| **Operating Temp. / 동작온도 ** | -10 | - | 60 | ℃ |
2.5 Strokes / 스트로크
| Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
| MIN Position / 최소 수축 위치 | 2.5 | 3.0 | 3.5 | mm | |
| MAX Position / 최대 확장 위치 | 98.0 | 98.5 | 99.0 | mm | |
| Stroke length/ 스트로크 | 95.5 | mm |
⁕ 매니저 소프트웨어 또는 파라메터 맵의 Min / Max Position Calibration 기능으로 Min / Max 위치값 동기화 가능
2.6 PWM Signal
| Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
| Min Pulse/최소수축 펄스 | 900 | us | Period 8~21ms | ||
| Neutral Pulse/센터 펄스 | 1500 | us | |||
| Max Pulse/최소수축 펄스 | 2100 | us |
2.7 No Load Speed / 무부하 속도
| Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
| Maximum Speed at 12.0V 최대 속도 at 12.0V | 72 | 80 | 88 | mm/s | L12-20PT-x |
| 25.2 | 28 | 30.8 | mm/s | L12-30PT-x |
2.8 Load / 부하
| Parameter Parameter | Min | Rated | Max | Unit | Note |
|---|---|---|---|---|---|
| Load at 12.0V 부하 at 12.0V | 17.0 | N | L12-20PT-x | ||
| 3.82 | lbf | ||||
| 1.73 | kgf | ||||
| 31.0 | N | L12-30PT-x | |||
| 6.96 | lbf | ||||
| 3.16 | kgf |
⁕ 1 kgf = 9.8N, 1lbf = 4.45N
2.9 Self Lock Feature / 셀프-락 기능
| Parameter | Min | Norm | Max | Unit | Note |
|---|---|---|---|---|---|
| Slef Lock | - | N/A(불가) | - | L12-20x-x | |
| - | Available(가능) | - | L12-30x-x |
Tip
Self-Lock 이란 액츄에이터가 전원을 통한 모터의 힘 없이, 기구마찰력만으로 위치를 고수할 수 있는 힘을 의미합니다.
3. 참고 자료
3.1 Load Vs Current
부하에 따른 소비 전류를 나타낸 그래프 입니다. 해당 값은 오차를 포함하고 있습니다. 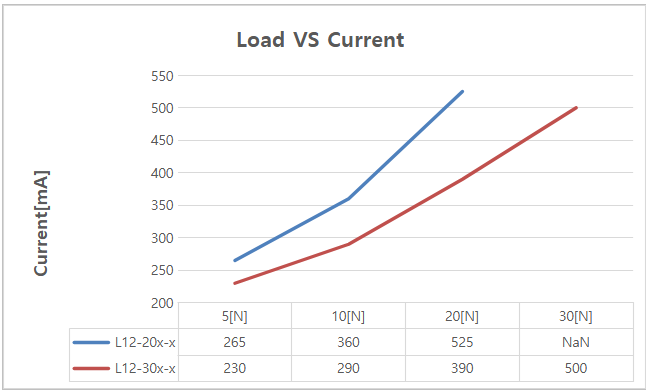
3.2 Load Vs Speed
부하에 따른 모터의 최대 속도도를 나타낸 그래프 입니다. 해당 값은 오차를 포함하고 있습니다. 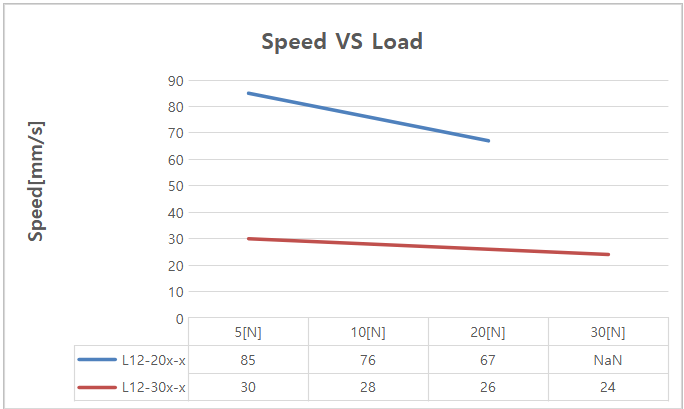
3.3 Voltage Vs Stall Force
입력 전압에 따른 Stall Force를 측정한 Data입니다. 해당 Data는 오차를 포함하고 있음으로 참고로 사용하시면 됩니다.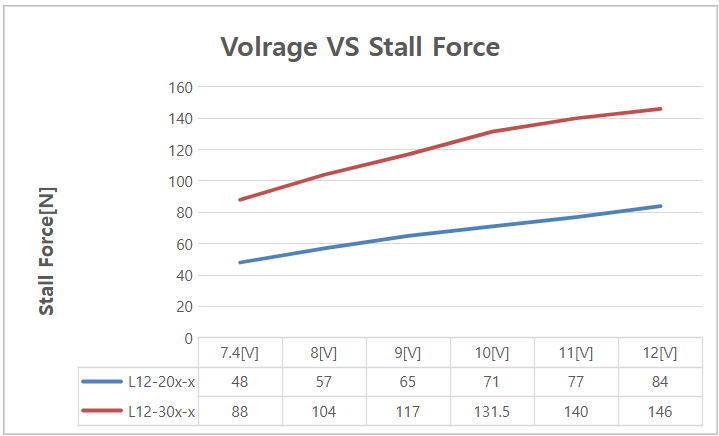
3.4 Voltage Vs Speed
입력 전압에 따른 무부하 최대 속도를 측정한 Data입니다. 해당 Data는 오차를 포함하고 있음으로 참고로 사용하시면 됩니다.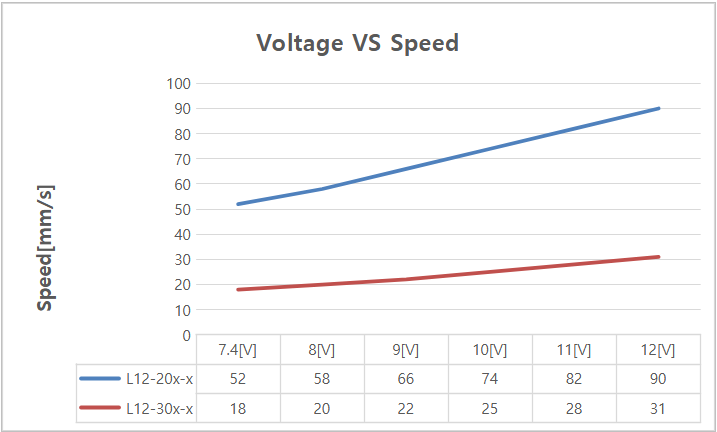
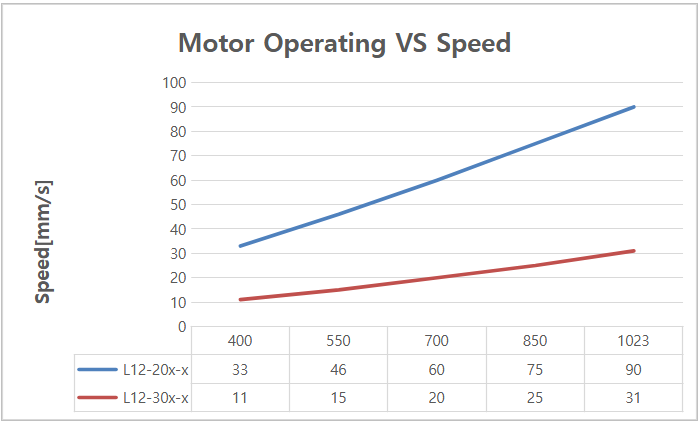
3.5 Motor Operating Rate
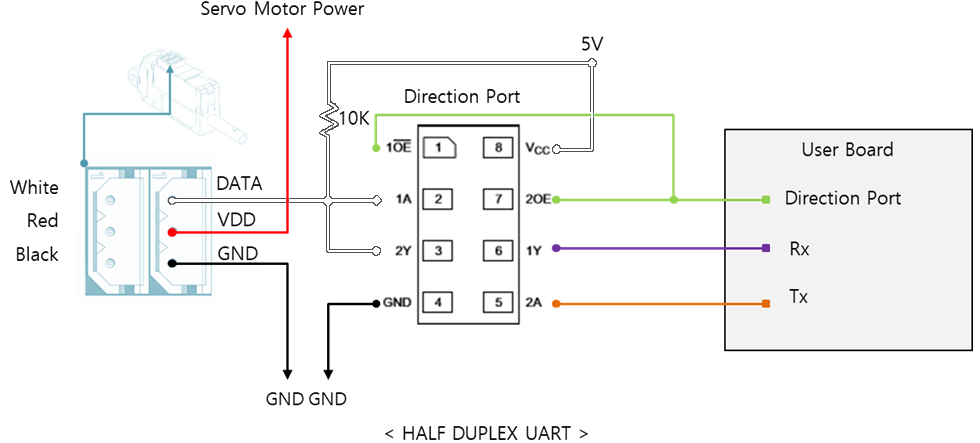
3.6 PIN Map
| PIN NUMBER(COLOR) | PIN NAME | FUNCTION |
|---|---|---|
| 1(WHITE) | DATA | 통신 |
| 2(RED) | VCC | 전원 + |
| 3(BLACK) | GND | 전원 - |